
KUKA Robot Sync Tool
Real-time communication between Unity and KUKA KR210 R2700
Real-time communication between Unity and KUKA KR210 R2700
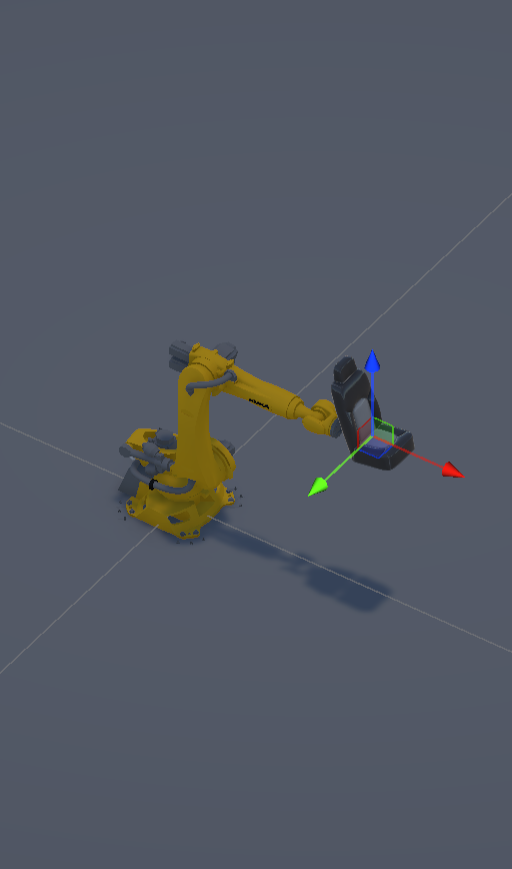
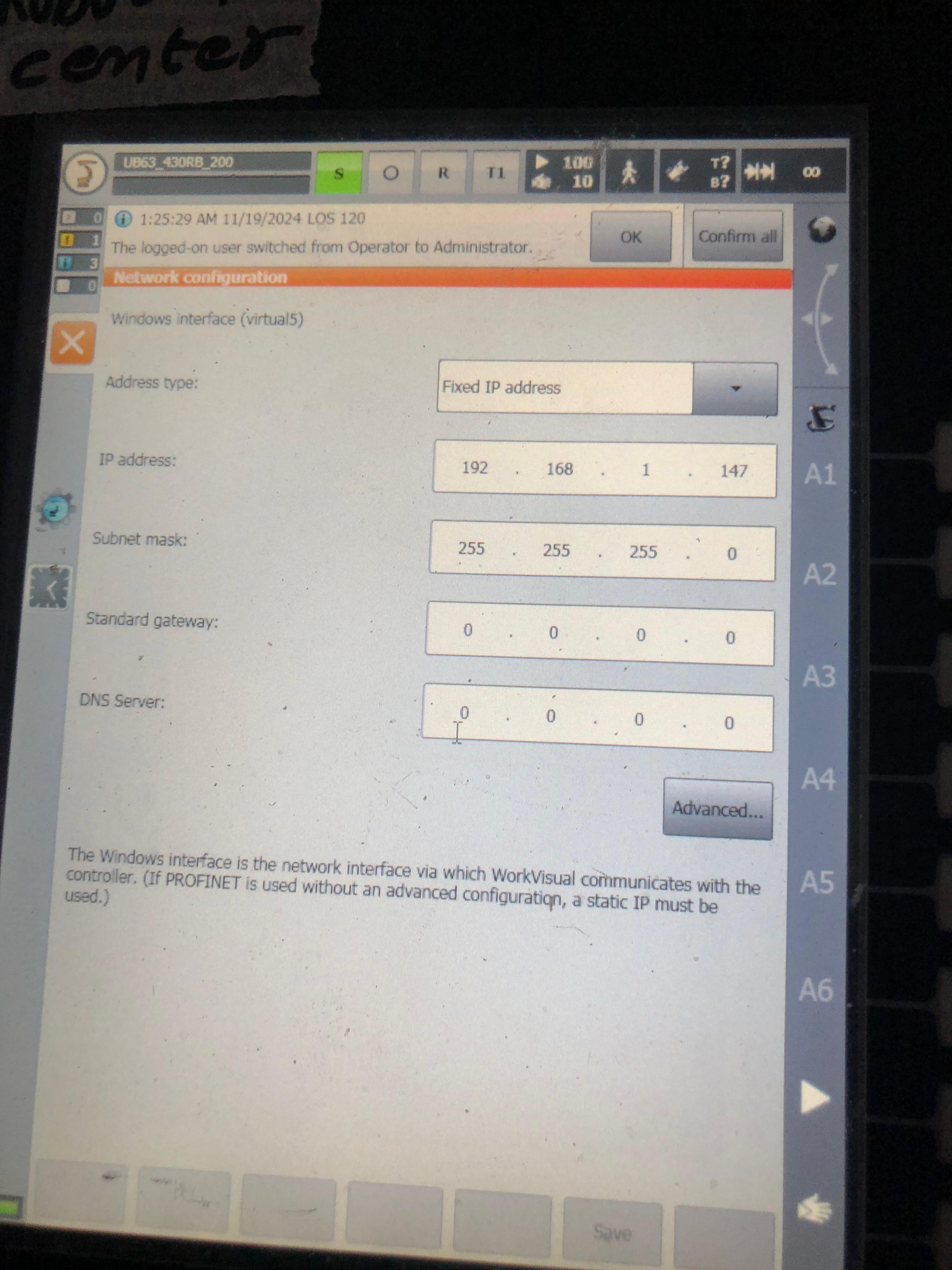
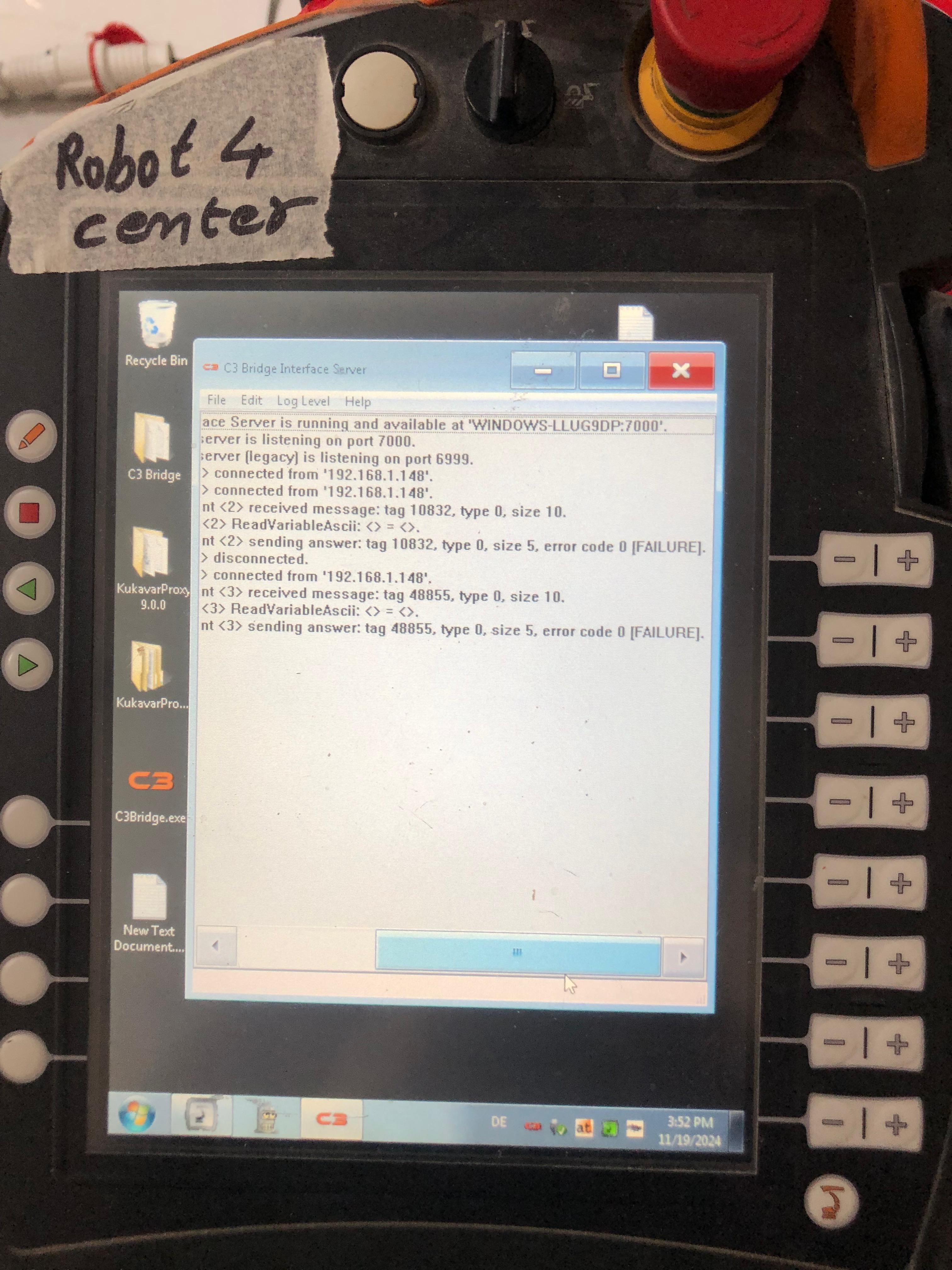
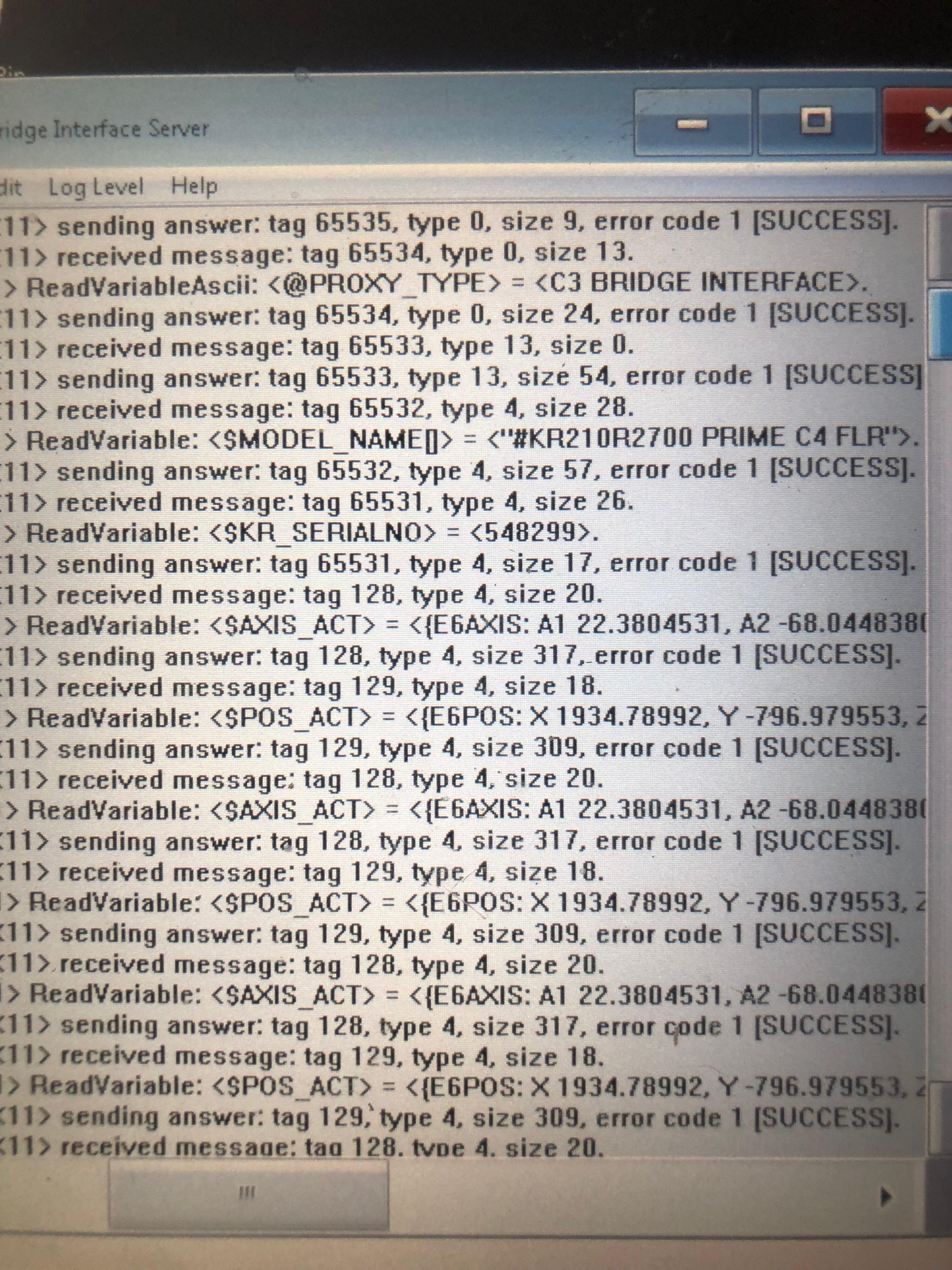
This Unity-based application establishes a real-time link between a procedural digital twin and a physical KUKA KR210 R2700 robot using the C3 Bridge protocol. It supports bi-directional streaming of joint and end-effector data, allowing live synchronization and control of robotic movements through Unity’s interface.
Interested in collaborating or learning more? Reach out at